Optimizacija zmogljivosti z MPU-6050: nastavitev, umerjanje in aplikacije
2024-04-25
9229
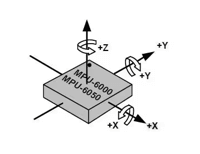
MPU-6050 je prva integrirana 6-osna komponenta za obdelavo gibanja na svetu, ki združuje 3-os osi žiroskopa, 3-osi pospeševalni merilnik in razširljiv digitalni procesor gibanja (DMP).Namen uporabe je pridobiti naklon kota predmeta, ki ga je treba izmeriti (na primer štirikolesnik, uravnotežen avtomobil) na osi x, y in z, torej kot nagiba, kot kota in kota.Šest podatkov MPU-6050 (tri-osi pospeška AD in trios kotna hitrost AD AD) smo prebrali prek vmesnika I2C.Po obdelavi drže fuzije lahko izračunamo koti naklona, zvitka in šivanja.Kot usmerjena referenca za merilne vrednosti je opredelitev smeri koordinate senzorja, kot je prikazana na spodnji sliki, ki sledi načelu desnega koordinatnega sistema (torej desni palec kaže na pozitivno smer X-Osi, kazalec kaže na pozitivno smer osi Y, srednji prst pa na pozitivno smer osi z.
Katalog
MPU-6050 lahko s svojim namenskim senzorskim avtobusom I2C lahko sprejema neposredno iz zunanjega 3-oškega kompasa, kar zagotavlja celoten 9-osni MotionFusion ™.Odpravlja problem neskladja med kombinirano časovnico žiroskopa in pospeševalnikom ter znatno zmanjša prostor za embalažo v primerjavi z večkomponentnimi rešitvami.Ko je povezan s triosnim magnetometrom, je MPU-60X0 sposoben zagotoviti celoten izhod z fuzijo gibanja z 9 osi na svoj glavni I2C ali SPI vrat (upoštevajte, da je vrata SPI na voljo samo na MPU-6000).
Alternative in ustrezniki
- MPU-3300
- MPU-6000
- MPU-6500
Proizvajalec MPU-6050
Proizvajalec MPU-6050 je TDK.Po dveh ustanoviteljev TDK, dr. Yogoro Kato in Takei Takei, izumili Ferrita v Tokiu, sta ustanovila Tokio Denkikagaku Kogyo K.K.Leta 1935. Kot blagovna znamka globalne industrije elektronike je TDK vedno ohranjal prevladujoč položaj na področjih elektronskih surovin in elektronskih komponent.TDK-ov celovit in inovacijski portfelj izdelkov zajema pasivne komponente, kot so keramični kondenzatorji, aluminijasti elektrolitski kondenzatorji, filmski kondenzatorji, magnetni izdelki, visokofrekvenčni komponenti, piezoelektrični in zaščitni napravi, pa tudi senzorji in senzorski sistemi (kot so temperature in senzorji.Magnetni in MEMS senzorji) itd. Poleg tega TDK ponuja tudi napajalnike in energijske naprave, magnetne glave in druge izdelke.Njegove blagovne znamke vključujejo TDK, EPCOS, Invensens, Micronas, Tronics in TDK-LAMBDA.
Notranji blok diagram MPU-6050

Med njimi sta SCL in SDA vmesnika IIC, povezana z MCU, MCU pa nadzoruje MPU-6050 s tem vmesnikom IIC.Obstaja tudi vmesnik IIC, in sicer AUX_CL in AUX_DA.Ta vmesnik lahko uporabite za povezavo zunanjih podrejenih naprav, kot so magnetni senzorji, da tvorijo senzor devetih osi.VLogic je napetost IO vrat.Ta zatič lahko podpira najmanj 1,8 V.Običajno ga povežemo neposredno z VDD.AD0 je nadzor nad naslovom vmesnika Slave IIC (povezan z MCU).Ta zatič nadzoruje najnižji del naslova IIC.Če je povezan z GND, je IIC naslov MPU-6050 0x68;Če je povezan z VDD, je 0x69.Upoštevajte, da tukaj naslov ne vključuje najnižjih prenosnih prenosov podatkov (najnižji bit se uporablja za predstavljanje operacij branja in pisanja).Na MWAlancedStc15 je AD0 povezan z GND, zato je IIC naslov MPU-6050 0x68 (razen najnižjega bita).
Inicializirajte vmesnik IIC
MPU-6050 uporablja IIC za komunikacijo s STC15, zato moramo najprej inicializirati podatkovne linije SDA in SCL, povezane z MPU-6050.
Ponastavitev MPU-6050
Ta korak obnovi vse registre znotraj MPU-6050 na njihove privzete vrednosti, kar je doseženo s pisanjem 1 do Bit7 registra za upravljanje moči 1 (0x6b).Po ponastavitvi bo register za upravljanje energije 1 obnovljen na privzeto vrednost (0x40), ta register pa mora biti pozneje nastavljen na 0x00, da se zbudi MPU-6050 in ga postavi v normalno delovno stanje.
Nastavite celoten obseg senzorja kotne hitrosti (žiros) in senzorja pospeška
V tem koraku nastavimo celotno območje (FSR) obeh senzorjev prek registra konfiguracije žiroskopa (0x1b) in registra konfiguracije senzorjev pospeška (0x1c).Običajno nastavimo celoten obseg žiroskopa na ± 2000dps in celoten obseg merilnika pospeška na ± 2G.
Nastavite druge parametre
Tu moramo konfigurirati tudi naslednje parametre: Izklopite prekinitve, onemogočite vmesnik AUX I2C, onemogočite FIFO, nastavite hitrost vzorčenja žiroskopa in konfigurirate digitalni filter z nizkim prehodom (DLPF).Ker ne uporabljamo prekinitev za branje podatkov v tem poglavju, je treba funkcijo prekinitve izklopiti.Hkrati, ker za povezavo drugih zunanjih senzorjev ne uporabljamo vmesnika AUX I2C, moramo zaprti tudi ta vmesnik.Te funkcije je mogoče nadzorovati s pomočjo registra Omogoči prekinitev (0x38) in uporabniškega nadzora (0x6a).MPU-6050 lahko uporablja FIFO za shranjevanje podatkov senzorjev, vendar jih v tem poglavju nismo uporabili, zato je treba vse kanale FIFO zaprti.To je mogoče nadzorovati s pomočjo registra FIFO Enable (0x23).Vrednost tega registra je privzeto 0 (torej FIFO je onemogočena), tako da lahko privzeto vrednost neposredno uporabimo.Stopnja vzorčenja žiroskopa nadzira register delilnika vzorčenja (0x19).Običajno to hitrost vzorčenja nastavimo na 50. Konfiguracija digitalnega filtra z nizkim prehodom (DLPF) se zaključi prek konfiguracijskega registra (0x1a).Na splošno bomo nastavili DLPF na polovico pasovne širine za uravnoteženje natančnosti podatkov in hitrosti odziva.
Konfigurirajte vir sistemske ure in omogočite senzor kotne hitrosti in senzor pospeška
Nastavitev vira sistemske ure je odvisna od registra za upravljanje električne energije 1 (0x6b), kjer najnižji trije biti tega registra določajo izbiro vira ure.Privzeto so ti trije biti nastavljeni na 0, kar pomeni, da sistem kot vir ure uporablja notranji 8MHz RC oscilator.Vendar pa jo za izboljšanje natančnosti ure pogosto nastavimo na 1 in kot vir ure izberemo žiroskop osi x-osi.Poleg tega je omogočanje kotnega senzorja hitrosti in senzorja pospeška tudi pomemben korak v procesu inicializacije.Obe operaciji se izvajata prek registra upravljanja moči 2 (0x6c).Preprosto nastavite ustrezen bit na 0, da aktivirate ustrezen senzor.Po zaključku zgornjih korakov lahko MPU-6050 vnese normalno delovno stanje.Tisti registri, ki niso posebej nastavljeni, bodo sprejeli privzete vrednosti prednastavljene s strani sistema.
Kako deluje MPU-6050?
Giroski senzor
Senzor je v notranjosti opremljen z žiro, ki bo zaradi žiroskopskega učinka vedno ostala vzporedna z začetno smerjo.Zato lahko izračunamo smer in kota vrtenja tako, da zaznamo odstopanje žiroskosti od začetne smeri.
Senzor pospeška
Senzor merilnika pospeška je naprava, ki lahko meri pospeševanje in deluje na podlagi načela piezoelektričnega učinka.Med pospeševanjem senzor meri inercialno silo, ki se uporablja za masni blok in nato izračuna vrednost pospeška z uporabo Newtonovega drugega zakona.
Digitalni procesor gibanja (DMP)
DMP je modul za obdelavo podatkov v čipu MPU6050, ki ima vgrajen algoritem filtriranja Kalmana za pridobivanje podatkov iz senzorjev žiroskopa in pospeševanja in obdelavo izhodnih kvarterionov.Ta funkcija močno zmanjša delovno obremenitev perifernega mikroprocesorja in se izogne dolgočasnemu filtriranju in postopku fuzije podatkov.
Opombe:
Quaternions: Quaternions so preproste številke Supercomplex.Kompleksne številke so sestavljene iz resničnih števil in namišljene enote I, kjer je I^2 = -1.
Kje se uporablja MPU-6050?
- igrače
- slušalke in prenosne igre
- Krmilniki iger, ki temeljijo na gibanju
- Blurfree ™ tehnologija (za video/mirno stabilizacijo slike)
- Airsign ™ tehnologija (za varnost/preverjanje pristnosti)
- Prepoznavanje gestrestgestRure ™ IG ™
- nosljivi senzorji za zdravje, fitnes in šport
- Okvir za igre in aplikacije, ki omogočajo gibanje
- Tehnologija MotionCommand ™ (za geste kratke reze)
- Storitve, ki temeljijo na lokaciji, zanimive točke in mrtvo obračun
- 3D daljinski upravljalniki za internetno povezane DTV in nastavljene zgornje škatle, 3D miši
- Tehnologija Touchanywhere ™ (za nadzor/navigacija uporabniškega vmesnika "brez dotika")
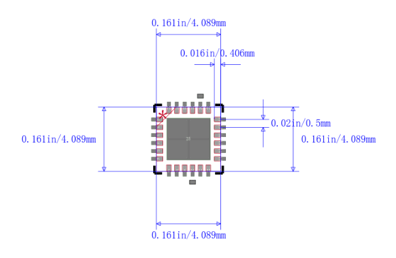
Paket MPU-6050
Kako zmanjšati hrup MPU-6050?
Za zmanjšanje hrupa MPU-6050 si lahko vzamemo naslednje načine.
Uporabite kalibrirane senzorje
Kalibriranje merilnika pospeška in žiroskopa MPU-6050 lahko odpravi pristranskost in napako samih senzorjev, s čimer zmanjša učinek hrupa.Postopek umerjanja je običajno sestavljen iz dveh stopenj: statična umerjanje in kalibracija gibanja.
Postopek filtriranja strojne opreme
Dodajanje filtrirnih kondenzatorjev v daljnovo linijo MPU-6050 lahko zmanjša vpliv hrupa napajanja na senzor.Medtem bi morali med postavitvijo PCB poskusiti, da MPU-6050 ne bo stran od potencialnih virov motenj, kot so visokofrekvenčne signalne linije in komponente z visoko močjo.
Obdelava programske filtriranja
Po zbiranju surovih podatkov iz MPU-6050 lahko dodamo povezavo za filtriranje programske opreme za predhodno obdelavo začetnih podatkov za odpravo motenj, ki jih povzroča hrup.Pogosto uporabljene metode filtriranja programske opreme vključujejo povprečno filtriranje, srednje filtriranje, filtriranje Kalmana in tako naprej.
Uporabite notranji filter z nizkim prehodom
MPU-6050 ima notranji integriran digitalni filter z nizkim prehodom, ki ga lahko uporabimo za zmanjšanje visokofrekvenčnega hrupa z nastavitvijo svoje frekvence.Zlasti lahko nastavimo frekvenco digitalnega filtra s spreminjanjem konfiguracijskega registra MPU-6050, da odpravimo visokofrekvenčni hrup, ki ga povzroča vzorčenje A/D.
Izračun gibanja gibanja na osnovi MPU-6050
MPU-6050 je šestih osi pospeševalnikov in žiroskopskega senzorja, ki ga je mogoče uporabiti za merjenje gibanja in odnosa predmetov.Izračun gibanja gibanja, ki temelji na MPU-6050, je mogoče uresničiti z naslednjimi koraki:
Prvi korak je branje podatkov senzorjev.Prebrati moramo podatke merilnika in žiroskopa iz senzorjev MPU-6050 z uporabo ustreznih gonilnikov in knjižničnih funkcij.Ti podatki se običajno pojavijo v digitalni obliki, zato je potrebno nekaj pretvorbe in kalibracijskega dela, da jih pretvori v dejanske meritve v fizičnih enotah.
Drugi korak je izračun pospeška.Najprej moramo podatke obdelati iz merilnika pospeška, da dobimo pospešek predmeta v vsaki osi.Nato moramo za izračun hitrosti in premika predmeta v vsaki osi vključiti podatke o pospeševanju.Numerične tehnike integracije, kot sta Eulerjeva metoda ali metoda Lunger-Kutta, se v tem procesu pogosto uporabljajo za zagotovitev natančnosti izračunov premikov.
Tretji korak je izračun kotne hitrosti.Z uporabo podatkov o žiroskopu je mogoče izračunati kotno hitrost predmeta v vsaki osi.Ponovno je treba te podatke umeriti in pretvoriti, da dosežemo kotno hitrost v dejanskih fizičnih enotah.
Četrti korak je izračun vrtenja.Z vključitvijo podatkov o kotni hitrosti lahko izračunamo kot vrtenja predmeta v vsaki osi.To je mogoče storiti s pomočjo numeričnih tehnik integracije, kot sta Eulerjeva metoda ali metoda Longe-Kutta za izračun kot.
Peti korak je združitev podatkov.Podatke kombiniramo iz pospeška merilnikov in žiroskopov, da pridobimo popolne informacije o odnosu in položaju predmeta.To je mogoče storiti z algoritmi, kot sta Quaternion-ov ali Eulerjev kotni reševalec.
Šesti korak je vizualizacija rezultatov.Izračunano smer gibanja predmeta pretvorimo v niz točk v 3D koordinatnem sistemu in jo prikažemo z uporabo ustreznih orodij za vizualizacijo za bolj intuitivno razumevanje poti gibanja in sprememb gibanja.
Pogosto zastavljena vprašanja [FAQ]
1. Kako natančen je MPU6050?
Pridobljeni rezultati so pokazali zadostno natančnost manj kot 1 % in zanesljivosti, kar je zagotavljalo pravilno dimenzioniranje dvigala in visoke standarde dvižne industrije.
2. Kako brati podatke iz MPU6050?
Za branje notranjih registrov MPU6050, mojster pošlje stanje začetka, ki mu sledi naslov sužnjev in zapis i2C in nato naslov registra, ki ga bo prebrano.
3. Kje se uporablja MPU6050?
V nosljivih zdravstvenih sledečih napravah, fitnes sledenja.V dronih in štirikotnikih se za nadzor položaja uporablja MPU6050.Uporablja se pri nadzoru robotske roke.Naprave za nadzor geste roke.
4. Ali je MPU6050 IMU?
Blok senzorja MPU6050 IMU bere podatke iz senzorja MPU-6050, ki je povezan s strojno opremo.Blok oddaja pospešek, kotno hitrost in temperaturo vzdolž osi senzorja.
5. Kakšna je obdelava MPU6050?
To je procesor na krovu MPU6050, ki združuje podatke, ki prihajajo iz merilnika pospeška in žiroskopa.DMP je ključ do uporabe MPU6050 in je podrobno razložen kasneje.Kot pri vseh mikroprocesorjih tudi DMP potrebuje vdelano programsko opremo za zagon.
Preizkus funkcije.Najvišji stroškovno učinkoviti izdelki in najboljša storitev je naša večna zaveza.
Vroč članek
- Sta CR2032 in CR2016 zamenljiva
- MOSFET: Opredelitev, načelo delovanja in izbira
- Namestitev in testiranje releja, interpretacija diagramov ožičenja releja
- CR2016 proti CR2032 Kakšna je razlika
- NPN proti PNP: Kakšna je razlika?
- ESP32 proti STM32: Kateri mikrokontroler je boljši za vas?
- LM358 Dvojni operativni ojačevalnik Obsežen vodnik: pinouts, diagrami vezja, ekvivalenti, koristni primeri
- CR2032 proti DL2032 proti CR2025 Primerjalni vodnik
- Razumevanje razlik ESP32 in ESP32-S3 tehnično in analizo uspešnosti
- Podrobna analiza vezja serije RC
 Raziskovanje zmogljivosti in aplikacij komunikacijskega čipa NRF24L01
Raziskovanje zmogljivosti in aplikacij komunikacijskega čipa NRF24L01
2024-04-25
 MMBT3904 NPN Tranzistor: njegove specifikacije, celovit vodnik za prijavo in MMBT3904 v primerjavi z MMBT5551
MMBT3904 NPN Tranzistor: njegove specifikacije, celovit vodnik za prijavo in MMBT3904 v primerjavi z MMBT5551
2024-04-25
Vroča številka dela
 CL21C220FBANNNC
CL21C220FBANNNC 04025C152KAQ2A
04025C152KAQ2A 06033C273MAT2A
06033C273MAT2A CGA5L2X8R1H334M160AE
CGA5L2X8R1H334M160AE CC1812KKX7R0BB684
CC1812KKX7R0BB684 1808SA271KAT1A
1808SA271KAT1A 1812AC153MAT1A
1812AC153MAT1A- 1808GC102KATBE
- 1808AC151KATME
 GRM1886S1H430JZ01D
GRM1886S1H430JZ01D
- A3P250-1VQG100I
- EP20K100EFC324-3N
- MAX9276AGTN/V+T
- AT29C257-12JC
- VI-234-MU
- RT1206BRE0722KL
- V48C15C150BN2
- ACS770KCB-150B-PFF-T
- VI-J70-MZ
- PM20TAB060
- XCR3384XL-10TQG144I
- T491B685K010ATAUTO7280
- LTC6081IMS8#TRPBF
- TMS320F28376SPTPT
- THDT6511DRL
- MAX793CSE
- MT48LC32M16A2P-75
- AP4525GEM
- CDCU877A
- CY7C1024AV33-10AC
- GD82559C
- LA1781M-MPB
- LT1636CMS8
- MAX3232ECUE
- PF38F3050M03DEA
- S1R72U01F12E200
- S3F866BXZZ-QZ8B
- SN65C3243PWRG4
- THGBM1G4D1EBAI7
- XC3S500E-PQG208
- AN41251A-VB
- AT76C651B
- LXT362PE
- SH79F169BU
- BD9846FV
- EN63AOQI
- LT8612SX
- VI-J22-M2
- KSZ9567RTXITR